 Current Loop
Current Loop
Overview
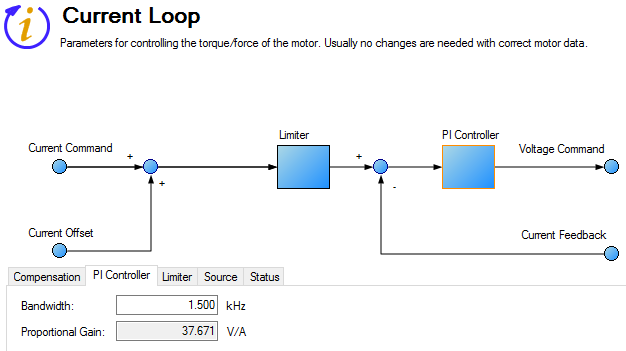
The current loop controls the production of current on each axis. The parameters that govern the current loop are shown in the Current Loop view. The various types of tuning for the drive adjust these parameters automatically, so you normally do not need to adjust the current loop parameters in the current loop screen. The Current Loop view includes an active block diagram. If you click on a block in the diagram, the appropriate tab opens below.
Current Loop Gain
The current loop bandwidthIn computer networking, bandwidth often refers to a data rate measured in bits/s, for example, network throughput. The reason for the connection of data rate with the term bandwidth is that the limit to the data rate of a physical communication link is related to its bandwidth in hertz is defined by AXIS#.IL.BW. In most applications the default bandwidth value is acceptable.
The current loop gain AXIS#.IL.KP is based on the bandwidth and the motor inductance:
AXIS#.IL.KP = 2 * pi * AXIS#.MOTOR.LQLL * AXIS#.IL.BW.
Where AXIS#.MOTOR.LQLL is the motor line-to-line inductance.
The current loop gain is set automatically by the drive. The inductance used in the calculation is determined using one of the following methods:
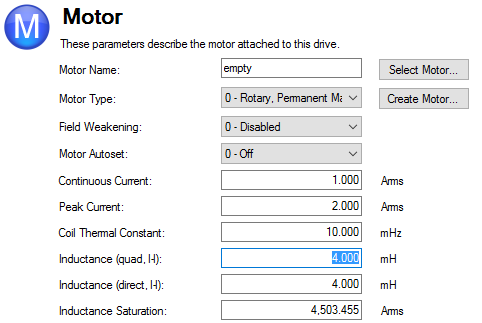
- Option A. When AXIS#.MOTOR.AUTOSET = 1 and motor parameters are automatically identified on the AXIS#.IL.FBSOURCE feedback deviceA process whereby some proportion of the output signal of a system is passed (fed back) to the input. In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position, the proportional gain of the current loop (AXIS#.IL.KP ) is set based on AXIS#.MOTOR.LQLL read from motor memory. The gain is shown as a read-only parameter in the current loop screen.
- Option B.When the motor is selected using the motor database or using the custom motor tool, the specified Inductance (quad) value (AXIS#.MOTOR.LQLL ) is used to set the current loop proportional gain (AXIS#.IL.KP ).
Related Parameters
|
Stay Connected with Kollmorgen       
|
Copyright © 2018 Kollmorgen |
|